Method
The Metropolis algorithm used Monte Carlo integration to simulate random selections from a probability density function (PDF). The algorithm is shown in Figure 2. Outside of the algorithm described in Figure 2, there is another to check the state of the system and evaluate whether or not equilibrium has been reached. To determine whether or not equilibrium has been reached, the overall energy of the system is tracked and when the rate of energy change slows down significantly, we can say that the system is approximately at equilibrium.
Once this state has been reached, the Metropolis algorithm is run for another 10,000 and the measurements of $E$ and $S$ are taken from this and later used to calculate $C$ and $\chi$.
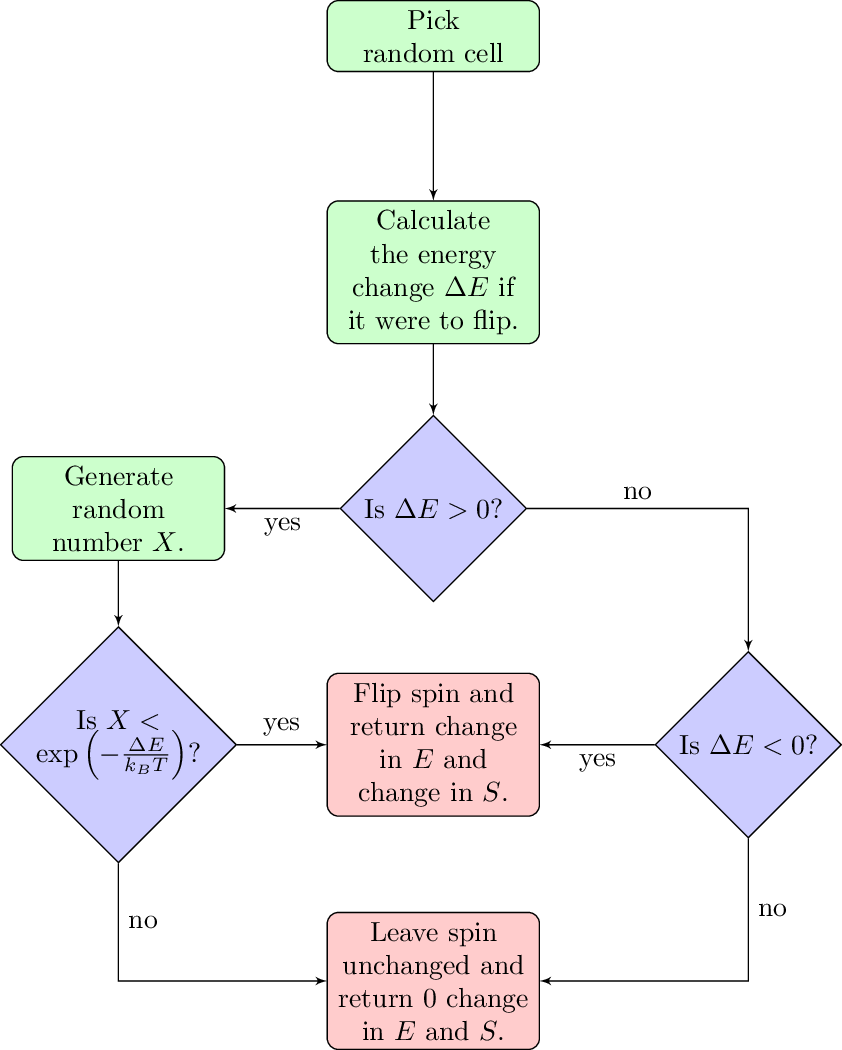
Figure 2: Flow chart describing the implementation of the Metropolis algorithm in this model.
Aside from the Metropolis algorithm, a few other considerations are required. One is for the calculation of the total energy of an array. Considering the first term in Equation \ref{eq:E}, each site has four neighbours. However, if the sum of the four neighbours is taken then there would be some double counting and so to avoid this, we only consider the contribution from the cells to the right and the bottom of the current cell. Therefore, when adding up the cells (and making the array cyclic in $x$ and $y$) we can ensure that every pairwise interaction is accounted for.
Additionally, a substitution is made where $\beta = J/k_{B}T$. This means that the model can be investigated by only varying $\beta$ as opposed to both $J$ and $T$.
To improve the efficiency of the algorithm, the total energy is only calculated once at the start of the simulation. For every subsequent iteration, the energy would be updated by adding or subtracting energy change caused by flipping (or not flipping) a site.